Pre-processing
Last reviewed version: 2.18.1Modelling in AquaEdit
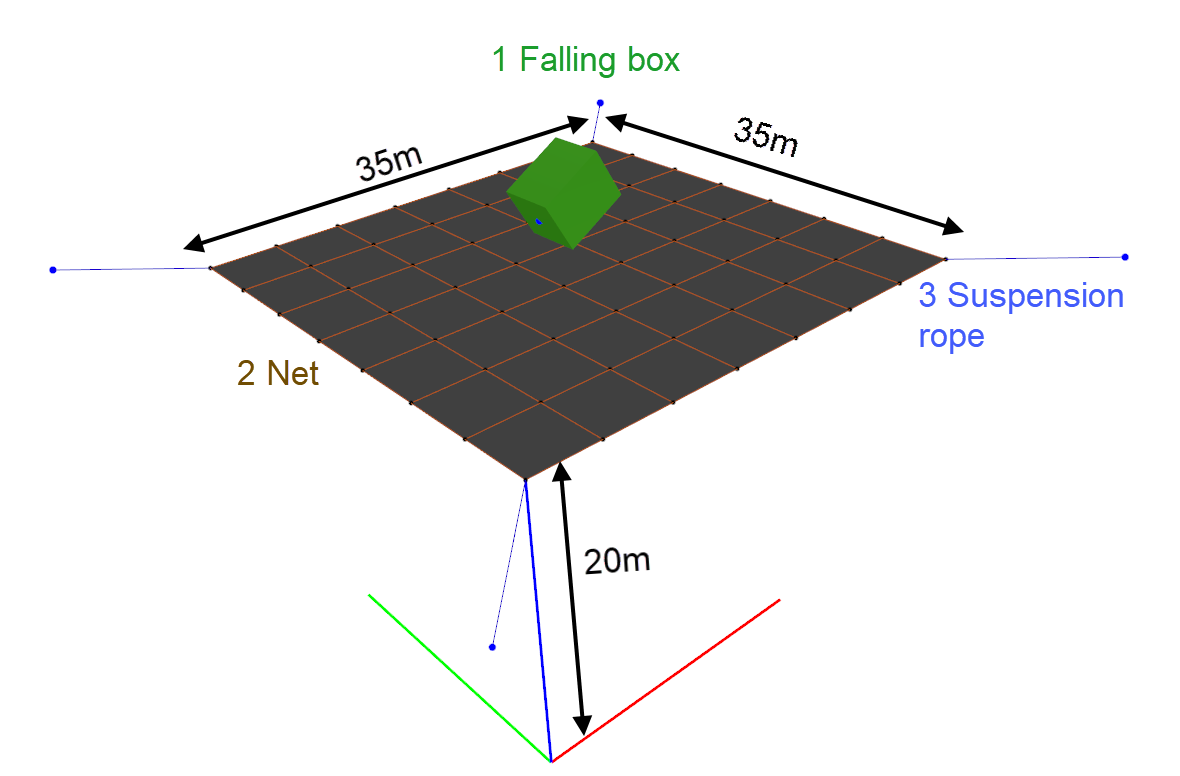
Open the .amodel that is associated with this case study in AquaEdit. The model consists of three component groups; Falling box, Net and Suspension rope.
Component properties
The box is modelled as a component Beam with an arbitrary angle in the xz-plane, to illustrate a random drop. The chosen load formulation for the Beam is Morison submerged. In combination with the Water volume correction: With slamming, AquaSim will automatically adjust the properties that is valid in air. Properties of the beam is shown in the table below:
| 1 | Falling box |
|---|---|
| Type | BEAM |
| Height x width | 4 m x 4 m |
| E-modulus | 2.1E+11 N/m2 |
| Area | 16 m2 |
| Volume | 16 m3/m |
| Weight in air | 20 kg/m |
| Weight in water | -1.638E4 kg/m |
| Drag coefficient Y / Z | 1.2 / 1.2 |
| Adde mass coefficient Y / Z | 2.0 / 2.0 |
The Suspension rope is modelled as trusses. The purpose of the suspension trusses is to restrain the net from falling. The truss is made fairly soft, with a low E-modulus. That is because they are meant to act as shock absorbers.
| 3 Suspension rope | |
|---|---|
| E-modulus | 2.1E07 N/m2 |
| Area | 2.46E-03 m2 |
| Weight in air | 2.62 kg/m |
| Weight in water | 0.0985 kg/m |
| Diameter Y / Z | 0.056 m / 0.056 m |
| Drag coefficient Y / Z | 1.2 / 1.2 |
| Added mass coefficient Y /Z | 1.0 / 1.0 |
Add Spring type OFFLOADED
For the current model-setup the box is free to translate and rotate in any direction. This will cause large initial translations, and potential unstable analysis which can lead to divergent results. To dampen this, one can apply a spring of type OFFLOADED. This spring is constant in the initial steps. In the dynamic part of the analysis, the effect of this spring is removed.
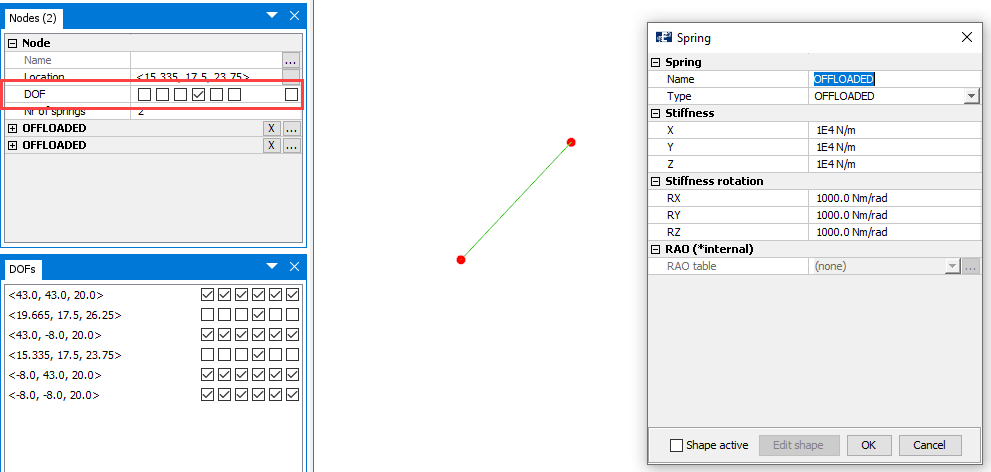
The end-nodes are also restrained from rotation about x-axis.
Add component contact
Contact between Falling box and Net should now be established. Adding contact between two component groups can be done in two ways in AquaSim:
- Select the two component groups from the Components-window > Right click > Operations > Add contact.
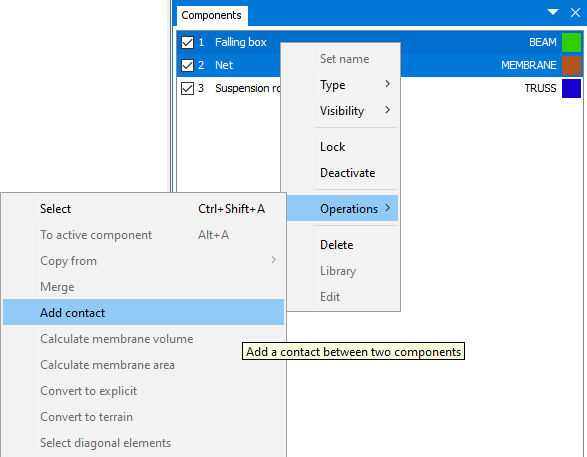
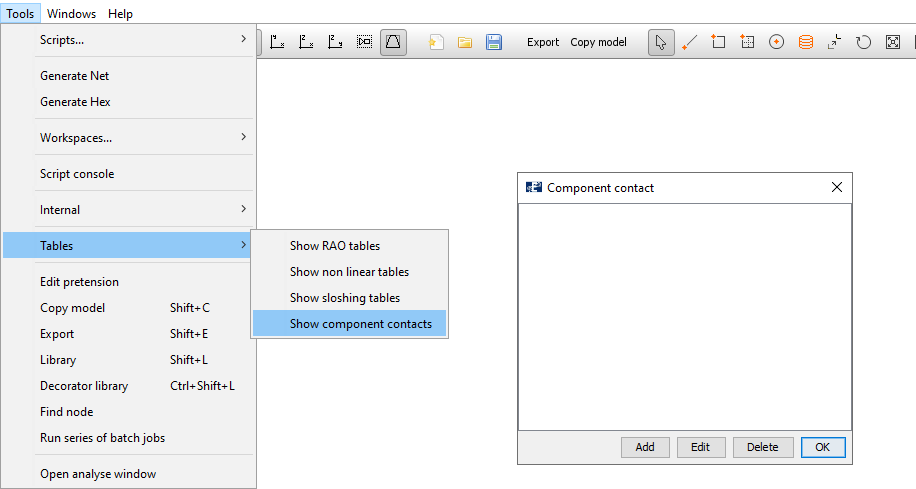
- Alternatively, select Tools > Tables > Show component contacts and the select Add
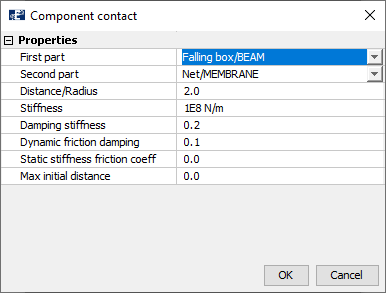
Component Falling box is selected as First element and Net as the Second element:
- Distance/ Radius: defines when contact should occur. Aquasim treats this parameter a bit different depending on the type of component group that is included here. If contact is defined between a Beam (or Truss) and Beam (or Truss) this parameter can be seen as a radius to Second element in which contact should start. In this case, we have contact between Beam and Membrane. Then this parameter defines at what distance between the Beam and the surface of the Membrane. When this equals 2.0, then contact will start when one of the nodes on the beam are 2.0 meters from the Membrane-surface. If it is 0.0, then contact start when the distance is 0.0 m. In our case, we have a rectangular shaped box of 4 x 4 m, and since we want contact to start when the outer edge of the cross section hits the Net, we set Distance / Radius = 2.0. Unit is meters.
- Stiffness: is the spring stiffness of the contact. The higher the stiffness, the tighter the contact.
- Damping stiffness: provides damping in the direction normal to the contact. This factor is proportional to Stiffness. If an impact is elastic, the box will bounce back and if the impact is plastic the energy of the impact will be drained, and the box will not bounce back. We assume some damping and set Damping stiffness = 0.2.
- Dynamic friction damping: this is a factor that is proportional to the stiffness in the tangential direction to the element. This can be interpreted as a friction that prevents the box from sliding back to the impact point. The factor is dependent on the relative velocity between the colliding elements, and hence only works when we have a dynamic situation. We assume that when the box hits the net, it can to some extent slide and set Dynamic friction damping = 0.1.
- Static stiffness friction coefficient: is a friction force coefficient that is proportional to the relative displacement between the colliding elements. This coefficient is constant and pulls the object back to the impact point. We do not assume such effect in this case and keep Static friction coefficient = 0.
- Max initial distance: when establishing contact between two component groups, AquaSim will keep track of the position and relative distance between all elements in the two component groups. If you have a model with large number of elements, this may contribute to slow down analysis time. Applying Max initial distance will only establish contact between elements that have an initial distance that is less than this value. If Max initial distance is 0, then contact will be established for all elements in the two component groups. Since this is a small model, we keep Max initial distance = 0.
We accept this table and select OK.